Траектория. III
Траектория - это линия, которую тело описывает при движении.
Траектория пчелы
Путь - это длина траектории. То есть длина той, возможно, кривой линии, по которой двигалось тело. Путь скалярная величина ! Перемещение - векторная величина ! Это вектор, который проведен из начальной точки отправления тела в конечную точку. Имеет численное значение, равное длине вектора. Путь и перемещение - это существенно разные физические величины.


Обозначения пути и перемещения вы можете встретить разное:
Сумма перемещений
Пусть в течение промежутка времени t 1 тело совершило перемещение s 1 , а в течение следующего промежутка времени t 2 - перемещение s 2 . Тогда за все время движения перемещение s 3 - это векторная сумма

Равномерное движение
Движение с постоянной по модулю и по направлению скоростью. Что это значит? Рассмотрим движение машины. Если она едет по прямой линии, на спидометре одно и то же значение скорости (модуль скорости), то это движение равномерное. Стоит машине изменить направление (повернуть), это будет означать, что вектор скорости изменил свое направление. Вектор скорости направлен туда же, куда едет машина. Такое движение нельзя считать равномерным, несмотря на то, что спидометр показывает одно и то же число.
Направление вектора скорости всегда совпадает с направлением движения тела
Можно ли движение на карусели считать равномерным (если не происходит ускорение или торможение)? Нельзя, постоянно изменяется направление движения, а значит и вектор скорости. Из рассуждений можно сделать вывод, что равномерное движение - это всегда движение по прямой линии! А значит при равномерном движении путь и перемещение одинаковы (поясни почему).
Нетрудно представить, что при равномерном движении за любые равные промежутки времени тело будет перемещаться на одинаковое расстояние.
Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение ) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы и ), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
На рис. 1.1:
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия .
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).

Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
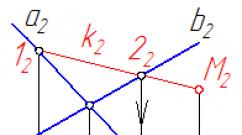
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения (см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно А x и В x . Длина отрезка А x В x на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
S x = A x B x
ВАЖНО!
Напоминаю для тех, кто не очень хорошо знает математику: не путайте вектор с проекцией вектора на какую-либо ось (например, S x). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.

Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
S x = x – x 0
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
S y = y – y 0 S z = z – z 0
Здесь x 0 , y 0 , z 0 — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).

Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х 0 и у 0 , то есть А(х 0 , у 0). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).

Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
S x = x – x 0 S y = y – y 0
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора , с помощью которой можно найти модуль вектора перемещения, так как
АС = s x CB = s y
По теореме Пифагора
S 2 = S x 2 + S y 2
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Положение материальной точки определяется по отношению к какому-либо другому, произвольно выбранному телу, называемому телом отсчета . С ним связывается система отсчета – совокупность системы координат и часов, связанных с телом отсчета.
В декартовой системе координат положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами x, y и z или радиусом-вектором r – вектор, проведенный из начала системы координат в данную точку. При движении материальной точки ее координаты с течением времени изменяются.r =r (t) или x=x(t), y=y(t), z=z(t) – кинематические уравнения материальной точки .
Основная задача механики – зная состояние системы в некоторый начальный момент времени t 0 , а также законы, управляющие движением, определить состояния системы во все последующие моменты времени t.
Траектория движения материальной точки – линия, описываемая этой точкой в пространстве. В зависимости от формы траектории различают прямолинейное и криволинейное движение точки. Если траектория точки – плоская кривая, т.е. целиком лежит в одной плоскости, то движение точки называют плоским.
Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути Δs и является скалярной функцией времени: Δs=Δs(t). Единица измерения – метр (м)– длина пути, проходимого светом в вакууме за 1/299792458 с.
IV . Векторный способ задания движения
Радиус-вектор r – вектор, проведенный из начала системы координат в данную точку. Вектор Δr =r -r 0 , проведенный из начального положения движущейся точки в положение ее в данный момент времени называется перемещением (приращение радиуса-вектора точки за рассматриваемый промежуток времени).
Вектором средней скорости < v > называется отношение приращения Δ r радиуса-вектора точки к промежутку времени Δt: (1). Направление средней скорости совпадает с направлением Δr .При неограниченном уменьшении Δt средняя скорость стремиться к предельному значению, которое называется мгновенной скоростью v . Мгновенная скорость это скорость тела в данный момент времени и в данной точке траектории: (2). Мгновенная скоростьv есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени.
Для
характеристики быстроты изменения
скорости v
точки
в механике вводится векторная физическая
величина, называемая ускорением.

Средним ускорением неравномерного движения в интервале от t до t+Δt называется векторная величина, равная отношению изменения скорости Δv к интервалу времени Δt:
Мгновенным ускорением а материальной точки в момент времени t будет предел среднего ускорения:(4). Ускорениеа есть векторная величина, равная первой производной скорости по времени.
V. Координатный способ задания движения
Положение точки М можно характеризовать радиус – вектором r или тремя координатами x, y и z: М(x,y,z). Радиус - вектор можно представить в виде суммы трех векторов, направленных вдоль осей координат: (5).
Из
определения скорости
![]() (6).
Сравнивая (5) и (6) имеем:(7). Учитывая (7) формулу (6) можно записать(8).
Модуль скорости можно найти:(9).
(6).
Сравнивая (5) и (6) имеем:(7). Учитывая (7) формулу (6) можно записать(8).
Модуль скорости можно найти:(9).
Аналогично для вектора ускорения:
![]() (10),
(10),
![]() (11),
(11),
Естественный способ задания движения (описание движения с помощью параметров траектории)
Движение
описывается формулой s=s(t).
Каждая точка траектории характеризуется
своим значением s.
Радиус – вектор является функцией от
s
и траектория может быть задана уравнением
r
=r
(s).
Тогда r
=r
(t)
можно представить как сложную функцию
r
.
Продифференцируем
(14). Величина Δs
– расстояние между двумя точками вдоль
траектории, |Δr
|
- расстояние
между ними по прямой линии. По мере
сближения точек разница уменьшается.
,
гдеτ
–
единичный вектор, касательный к
траектории.
,
тогда (13) имеет видv
=τ
v
(15). Следовательно скорость направлена
по касательной к траектории.
Ускорение
может быть направлено под любым углом
к касательной к траектории движения.
Из определению ускорения
![]() (16). Еслиτ
-
касательный к траектории, то
- вектор перпендикулярный этой касательной,
т.е. направлен по нормали. Единичный
вектор, в направлении нормали обозначаетсяn
.
Значение вектора
равно 1/R,
где R
– радиус кривизны траектории.
(16). Еслиτ
-
касательный к траектории, то
- вектор перпендикулярный этой касательной,
т.е. направлен по нормали. Единичный
вектор, в направлении нормали обозначаетсяn
.
Значение вектора
равно 1/R,
где R
– радиус кривизны траектории.
Точка,
отстоящая от траектории на расстоянии
и R
в направлении нормали n
,
называется центром кривизны траектории.
Тогда
(17). Учитывая вышеизложенное формулу
(16) можно записать:![]() (18).
(18).
Полное ускорение состоит из двух взаимно перпендикулярных векторов: , направленного вдоль траектории движения и называемого тангенциальным, и ускорения, направленного перпендикулярно траектории по нормали, т.е. к центру кривизны траектории и называемого нормальным.
Абсолютное
значение полного ускорения найдем:
![]() (19).
(19).
Лекция 2 Движение материальной точки по окружности. Угловое перемещение, угловая скорость, угловое ускорение. Связь между линейными и угловыми кинематическими величинами. Векторы угловой скорости и ускорения.
План лекции
Кинематика вращательного движения
При
вращательном движении мерой перемещения
всего тела за малый промежуток времени
dt
служит векторdφ
элементарного поворота тела. Элементарные
повороты
(обозначаются
или)
можно рассматривать какпсевдовекторы
(как бы).

Угловое перемещение - векторная величина, модуль которой равен углу поворота, а направление совпадает с направлением поступательного движения правого винта (направленный вдоль оси вращения так, что если смотреть с его конца, то вращение тела кажется происходящим против часовой стрелки). Единица углового перемещения – рад.
Быстроту
изменения углового перемещения с
течением времени характеризует угловая
скорость
ω
.
Угловая скорость твердого тела –
векторная физическая величина,
характеризующая быстроту изменения
углового перемещения тела с течением
времени и равная угловому перемещению,
совершаемому телом за единицу времени:
Направлен вектор ω вдоль оси вращения в ту же сторону, что и dφ (по правилу правого винта). Единица угловой скорости- рад/с
Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение ε
(2).

Направлен вектор ε вдоль оси вращения в ту же сторону, что и dω, т.е. при ускоренном вращении , при замедленном.
Единица углового ускорения – рад/с 2 .
За время dt произвольная точка твердого тела А переместиться на dr , пройдя путь ds . Из рисунка видно, что dr равно векторному произведению углового перемещения dφ на радиус – вектор точки r : dr =[ dφ · r ] (3).
Линейная
скорость точки
связана
с угловой скоростью и радиусом траектории
соотношением:

В векторном виде формулу для линейной скорости можно написать как векторное произведение: (4)
По определению векторного произведения его модуль равен , где - угол между векторами и, а направление совпадает с направлением поступательного движения правого винта при его вращении от к .
Продифференцируем (4) по времени:
Учитывая, что - линейное ускорение,- угловое ускорение, а- линейная скорость, получим:
Первый вектор в правой части направлен по касательной к траектории точки. Он характеризует изменение модуля линейной скорости. Следовательно, этот вектор – касательное ускорение точки: a τ =[ ε · r ] (7). Модуль касательного ускорения равен a τ = ε · r . Второй вектор в (6) направлен к центру окружности и характеризует изменение направления линейной скорости. Этот вектор – нормальное ускорение точки:a n =[ ω · v ] (8). Модуль его равен a n =ω·v или учитывая, что v = ω· r , a n = ω 2 · r = v 2 / r (9).
Частные случаи вращательного движения
При равномерном вращении: , следовательно .
Равномерное вращение можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот,
Частота вращения - число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени: (11)
Единица частоты вращения - герц (Гц).
При равноускоренном вращательном движении :
Лекция 3 Первый закон Ньютона. Сила. Принцип независимости действующих сил. Результирующая сила. Масса. Второй закон ньютона. Импульс. Закон сохранения импульса. Третий закон Ньютона. Момент импульса материальной точки, момент силы, момент инерции.
План лекции
Первый закон Ньютона
Второй закон Ньютона
Третий закон Ньютона
Момент импульса материальной точки, момент силы, момент инерции
Первый закон Ньютона. Масса. Сила
Первый закон Ньютона: Существуют такие системы отсчета, относительно которых тела движутся прямолинейно и равномерно или покоятся, если на них не действуют силы или действие сил скомпенсировано.
Первый закон Ньютона выполняется только в инерциальной системе отсчёта и утверждает существование инерциальной системе отсчёта.
Инерция – это свойство тел стремиться сохранять скорость неизменной.
Инертностью называют свойство тел препятствовать изменению скорости под действием приложенной силы.
Масса тела – это физическая величина являющаяся количественной мерой инертности, это скалярная аддитивная величина. Аддитивность массы состоит в том, что масса системы тел всегда равна сумме масс каждого тела в отдельности. Масса – основная единица системы «СИ».
Одной из форм взаимодействия является механическое взаимодействие . Механическое взаимодействие вызывает деформацию тел, а также изменение их скорости.
Сила – это векторная величина являющаяся мерой механического воздействия на тело со стороны других тел, или полей, в результате которого тело приобретает ускорение или изменяет свою форму и размеры (деформируется). Сила характеризуется модулем, направлением действия, точкой приложения к телу.
С древних времен человечество старалось добиться победы в столкновении с противником на максимально возможной дистанции, чтобы не губить собственных воинов. Пращи, луки, арбалеты, потом ружья, теперь и бомбы - все они нуждаются в точном расчете баллистической траектории. И если у старинной военной «техники» отследить точку попадания можно было визуально, что позволяло учиться и в следующий раз стрелять точнее, то в современном мире точка назначения обычно удалена настолько, что разглядеть ее без дополнительных приборов просто невозможно.
Что такое баллистическая траектория
Это путь, который преодолевает какой-либо объект. У него должна быть определенная начальная скорость. На него воздействует сопротивление воздуха и сила притяжения, что исключает возможность движения по прямой линии. Даже в космосе такая траектория будет искажаться под влиянием гравитации различных объектов, хоть и не так значительно, как на нашей планете. Если не учитывать сопротивление воздушных масс, то больше всего такой процесс перемещения будет напоминать эллипс.
Другой вариант - гипербола. И лишь в некоторых случаях это будет парабола или окружность (при достижении второй и первой космической скорости соответственно). В большинстве случаев такие расчеты проводятся для ракет. Они, как правило, летают в верхних слоях атмосферы, где влияние воздуха минимально. Как следствие, чаще всего баллистическая траектория все же напоминает именно эллипс. В зависимости от многих факторов, таких как скорость движения, масса, тип атмосферы, температура, вращение планеты и так далее, отдельные части пути могут принимать самые разнообразные формы.
Расчет баллистической траектории
Для того чтобы понять, куда именно упадет выпущенное тело, применяют дифференциальные уравнения и метод численного интегрирования. Уравнение баллистической траектории зависит от многих переменных, но существует и некий универсальный вариант, который не дает нужной точности, но вполне достаточен для примера.
y=x-tgѲ 0 -gx 2 /2V 0 2 -Cos 2 Ѳ 0, где:
- y - это максимальная высота над поверхностью земли.
- Х - дистанция от точки старта до момента, когда тело доберется до высшей точки.
- Ѳ 0 - угол бросания.
- V 0 - начальная скорость.
Благодаря указанной формуле появляется возможность описать баллистическую траекторию полета в безвоздушном пространстве. Получится она в форме параболы, что характерно для большинства вариантов свободного движения в подобных условиях и при наличии гравитации. Можно выделить следующие характерные особенности такой траектории:
- Самый оптимальный угол возвышения для максимальной дистанции - 45 градусов.
- Объект имеет одинаковую скорость движения как во время старта, так и в момент приземления.
- Угол броска идентичен углу, под которым произойдет падение.
- Объект долетает до вершины траектории за точно такое же время, за которое потом упадет вниз.
В подавляющем большинстве расчетов подобного рода принято пренебрегать сопротивлением воздушных масс и некоторых других факторов. Если их учитывать, то формула выйдет слишком уж сложной, а погрешность не так велика, чтобы значительно влиять на эффективность попадания.

Отличия от настильной
Под таким названием понимают другой вариант пути объекта. Настильная и баллистическая траектория - это несколько разные понятия, хотя общий принцип у них одинаков. Фактически такой вид движения подразумевает максимально возможное перемещение в горизонтальной плоскости. И на всем протяжении пути объект сохраняет достаточное ускорение. Баллистический вариант движения необходим для перемещения на большие дистанции. Например, настильная траектория наиболее важна для пули. Она должна лететь достаточно прямо максимально долго и пробивать все, что попадется у нее на пути. С другой стороны, ракета или снаряд из пушки наносят максимум разрушений именно в конце движения, так как набирают максимально возможную скорость. В промежутке своего движения они не столь сокрушительны.

Использование в современности
Баллистическая траектория чаще всего применяется в военной сфере. пули и так далее - все они летают далеко, и для точного выстрела нужно учитывать множество переменных. Кроме того, космическая программа также основана на баллистике. Без нее точно запустить ракету так, чтобы она в конечном итоге не упала на землю, а совершила несколько витков вокруг планеты (или вообще оторвалась от нее и отправилась дальше в космос), невозможно. В целом практически все, что умеет летать (вне зависимости от того, каким способом это делает), так или иначе связано с баллистической траекторией.

Заключение
Умение рассчитать все элементы и запустить какой-либо объект в нужное место - крайне важно в современности. Даже если не брать вооруженные силы, которые традиционно нуждаются в таких возможностях больше всех остальных, останется еще много вполне гражданских применений.
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Определение
Линию, которую описывает частица при своем движении, называется траекторией движения .
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория - кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
\[\overline{r}\left(t\right)={\overline{r}}_0+{\overline{v}}_0t+\frac{\overline{a}t^2}{2}\left(1\right),\]
(где $\overline{r}\left(t\right)$ - радиус-вектор точки в момент времени $t$; ${\overline{v}}_0$ - начальная скорость движения точки; $\overline{a}$ - ускорение точки,) траектория движения представляет собой плоскую кривую, что означает все точки этой кривой находятся в одной плоскости. Положение этой плоскости в пространстве задают векторы ускорения и начальной скорости. Ориентацию координатных осей чаще всего выбирают так, чтобы плоскость движения совпадала с одной из координатных плоскостей. В этом случае векторное уравнение (1) можно свести к двум скалярным уравнениям.
Уравнение траектории движения
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
\[\left\{ \begin{array}{c} x=v_0t{\cos \alpha \left(2\right),\ } \\ y=v_0t{\sin \alpha \ }-\frac{gt^2}{2}\left(3\right). \end{array} \right.\]
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
\[\left\{ \begin{array}{c} x=\frac{v^2_0{\sin \alpha {\cos \alpha \ }\ }}{g} \\ y=\frac{v^2_0{sin}^2\alpha }{2g} \end{array} \right.\left(5\right).\]
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($\frac{dy}{dx}$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t\ $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=\rho ,x_2=\varphi ,x_3=\ z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки - это значит указать эти функции: \
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($\overline{r}$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $\overline{r}$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение: \[\overline{r}=\overline{r}\left(t\right)\left(7\right).\]
- Третьим способом описания движения является описание с помощью параметров траектории.
Путь - это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
где $s$ - путь точки по траектории; $t$ - время движения; $A$ - коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Пример 1
Задание: Точка движется в плоскости XOY из начала координат со скоростью $\overline{v}=A\overline{i}+Bx\overline{j}\ ,\ $где $\overline{i}$, $\overline{j}$ - орты осей X и Y; $A$,B - постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. \textit{}
Решение: Рассмотрим уравнение изменения скорости частицы:
\[\overline{v}=A\overline{i}+Bx\overline{j}\ \left(1.1\right).\]
Из этого уравнения следует, что:
\[\left\{ \begin{array}{c} v_x=A, \\ v_y=Bx \end{array} \right.\left(1.2\right).\]
Из (1.2) имеем:
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
\[\left\{ \begin{array}{c} x=0 \\ y=0. \end{array} \right.\]

Пример 2
Задание: Движение материальной точки в плоскости описывает система уравнений: $\left\{ \begin{array}{c} x=At. \\ y=At(1+Bt) \end{array} \right.$, где $A$ и $B$ - положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
\[\left\{ \begin{array}{c} x=At. \\ y=At\left(1+Bt\right) \end{array} \right.\left(2.1\right).\]
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
Ответ: $y=x+\frac{B}{A}x^2$